Hydraulic and Pneumatic Systems.
|
| |||||||
Digital Signal Processing
Where we present several practices from PDS, to order in some faraway future...particular usefulness is sci_stem.sce
| ||||||
Digital Control.
| ||||||
|
Where we solve the inverse Z transform through two computational methods.
|
|
|
| |||||||||
Kinematics of Robots.
|
Class notes - Unit I.
|
| |||||||
LabVIEW
|
3 DOF manipulator arm torque calculator.
A simple LabVIEW application I made to calculate the needed torque for each motor on a 3DOF robotic arm manipulator for our service robot: SerBOT. 
| |||||
Intelligent Control.
|
Comparison between fuzzy controllers and standard PID controllers for a non-linear satellite system.
|
Inverse pendulum rule bases. Fuzzy system.
|
Fuzzy system. Inverse pendulum on Matlab.
|
Inverse pendulum controller in Matlab Simulink.
|
Automatic parking lot rule bases. Fuzzy system.
| ||||||||||
|
Automatic parking lot control in Matlab Simulink.
|
|
| ||||||||
Integration of Mechatronic Systems A.K.A. Matlab.
|
|
|
|
| ||||||||||
|
Practice for my Matlab/Arduino exam (which was easier than this...) where I created a GUIDE application to read analog state of a potentiometer and light or shut down three leds. Also added buttons to manually start them and plot the analog signal.
|
My Matlab/Arduino exam where we had to use the input command to control the blink of two LED.
| |||||||
|
|
|
|
| ||||||||||
|
|
|
|
| ||||||||||
|
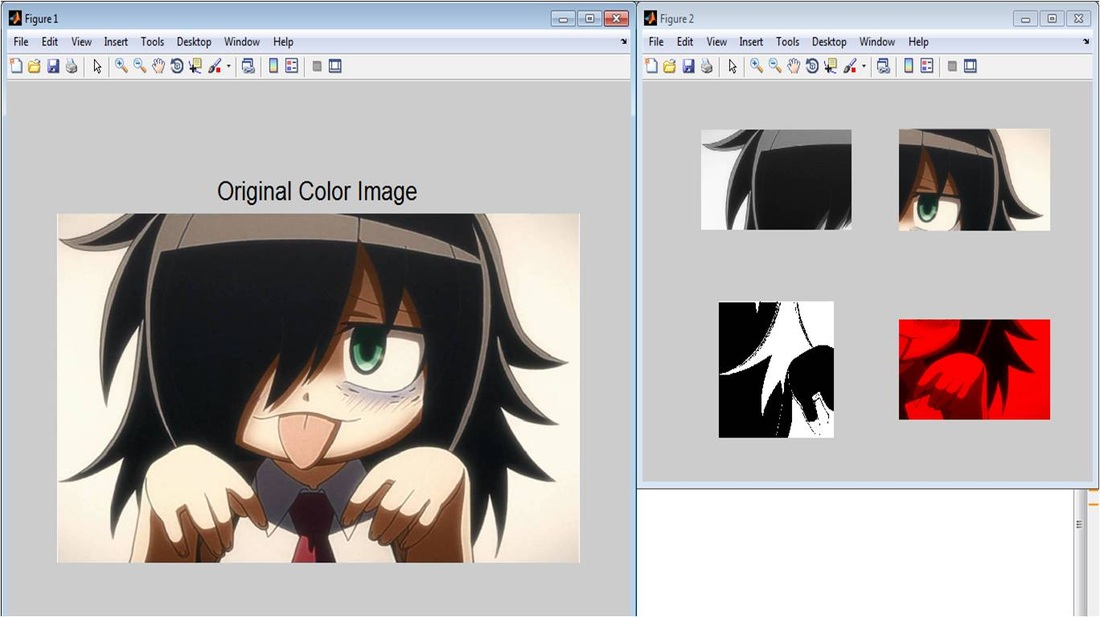
Just an exam from a friend that took the subject with another teacher and asked me to solve the exam for him. I complied of course as any programming is good practice.
This one takes an image and divides it into 4 segments by cropping and then applies a different effect to each segment. Credits to: http://www.mathworks.cn/matlabcentral/answers/46699
|
| ||||
Quality and Technological Innovation.
|
| |||||||
Termodynamics.
|
|
|
UNIT I - Exam. Raw version. Part 1.
|
UNIT I - Exam. Raw version. Part 2.
| ||||||||||
Industrial Networks.
|
Practice RS-232 v1.
Where I set up the RS-232 protocol to communicate a uC (PIC32MX534F064H) with my laptop.
|
Serial cable RS-232 to USB driver.
Mini32 Drivers.
Windows Hyperterminal.
|
Ethernet application to interact with Webpages. From PIC32 examples.
You modify only the Ethernet_events_code.c
|
Modulation.Several modulation applications using Matlab.
| |||||||||||||||||||||
Robotics II - Robot Dynamics.
|
What was meant to be the final robotics project. Sadly it was unfinished but still ongoing.
| ||||||||
