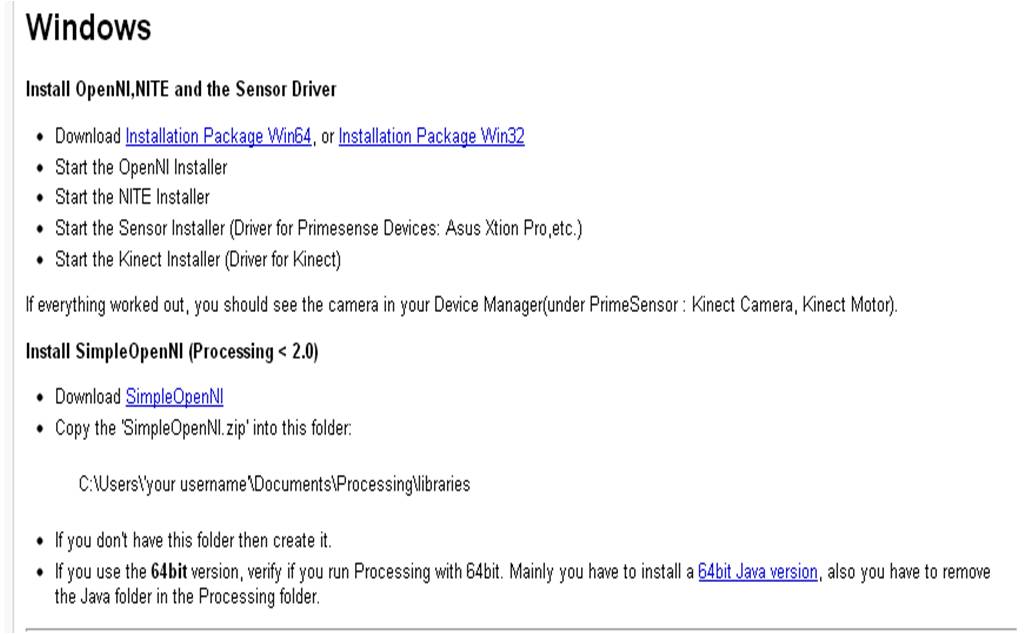
Setting communication between the MS Kinect and Processing.In order to establish communication between the MS Kinect and Processing we are going to use the SimpleOpenNI library. It is designed using the OpenNI framework, designed by a community of hackers that are famous for being the first to hack the MS Kinect before it even got into the market! In order to install it, we go to the SimpleOpenNI page and download the installer for Windows 32 or 64 bits.
You only need to uncompress and execute each one of the applications contained in the folder.
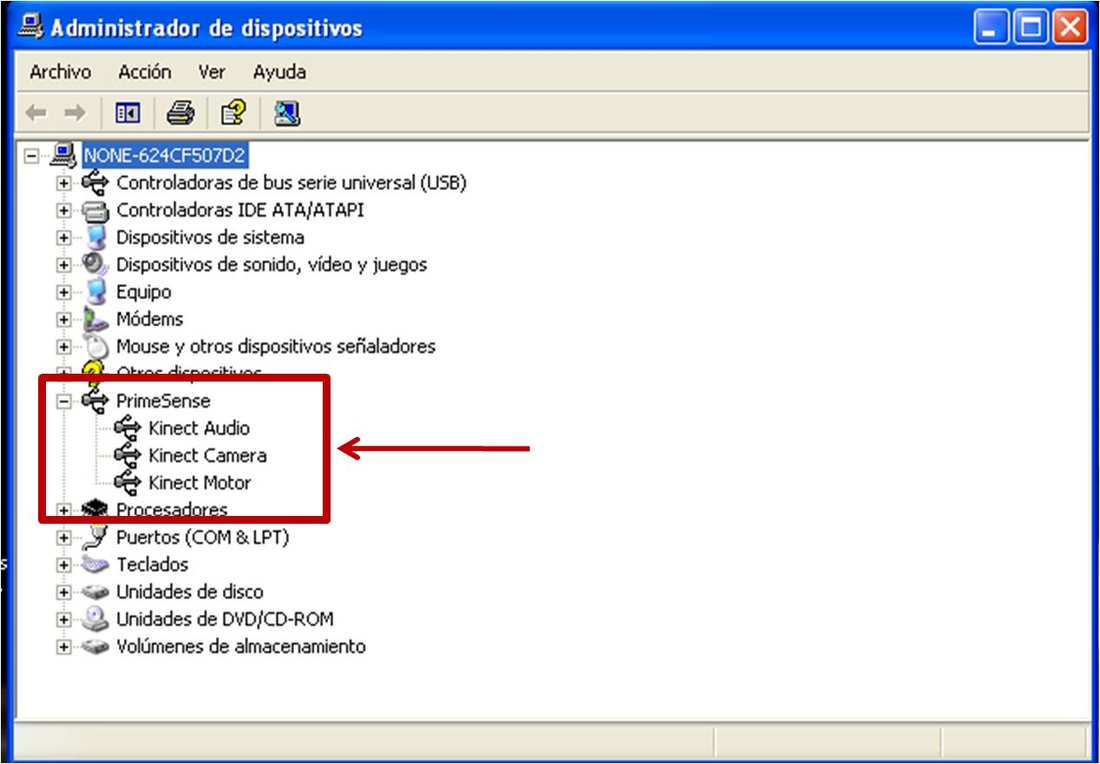
Afterwards you plug the MS Kinect and it must show in the Hardware menu as its own section showing Camera, Motor and Audio. |

|
|
Once that's done, you must download the SimpleOpenNI wrapper from the same page and uncompress the folder in the Processing/libraries directory which is created after you execute Processing for the first time. In my case its located on MyDocuments/Processing/libraries.
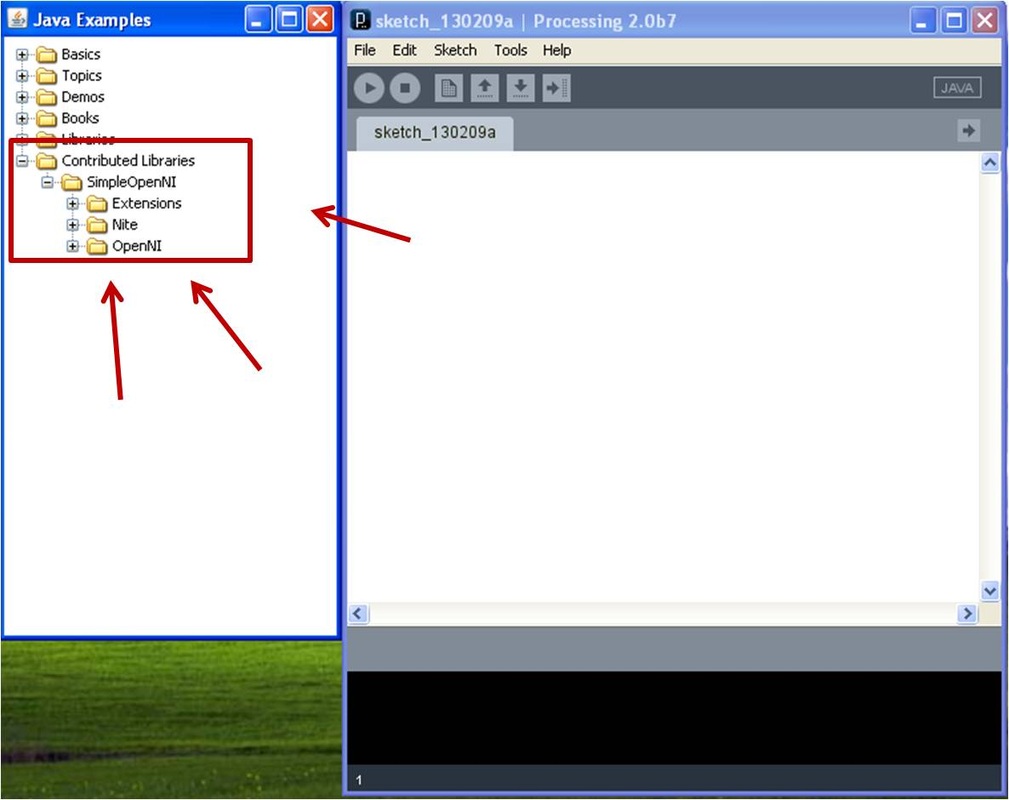
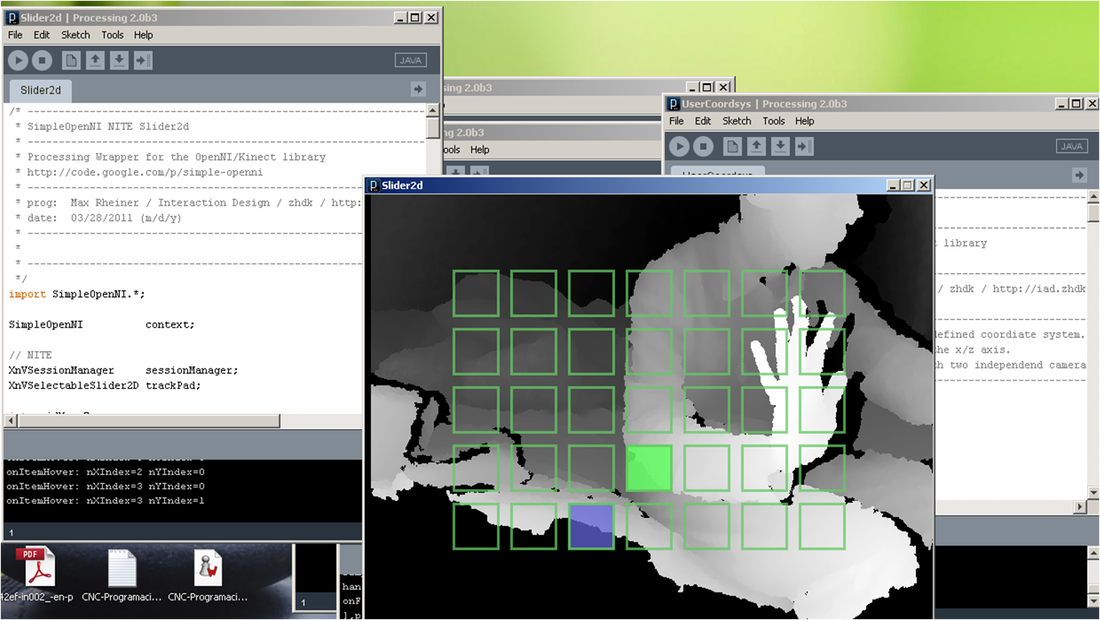
Restart Processing. Afterwards if you check the Contributed Libraries examples (go to File->Examples) you must see the SimpleOpenNI examples installed. You can click on anyone and execute them pressing the arrow like button. We'll execute the Slider2d example and see what happens. |
|
Troubleshooting.
|
The Kinect isn't recognized after installing the PrimeSense drivers.
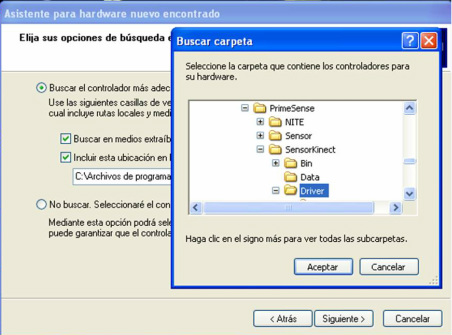
After I managed to install my MS Kinect on a Windows 7 laptop, I decided to replicate the experiment on my Windows XP desktop. To my surprise the drivers installed correctly but the Kinect wasn't recognized by the computer. The only thing I had to do is reference the driver installer to MyPC/ProgramFiles/PrimeSense/Drivers directory on my computer to get it to recognize them. Repeat the process for the Motor, Camera and Audio controllers. |
|
